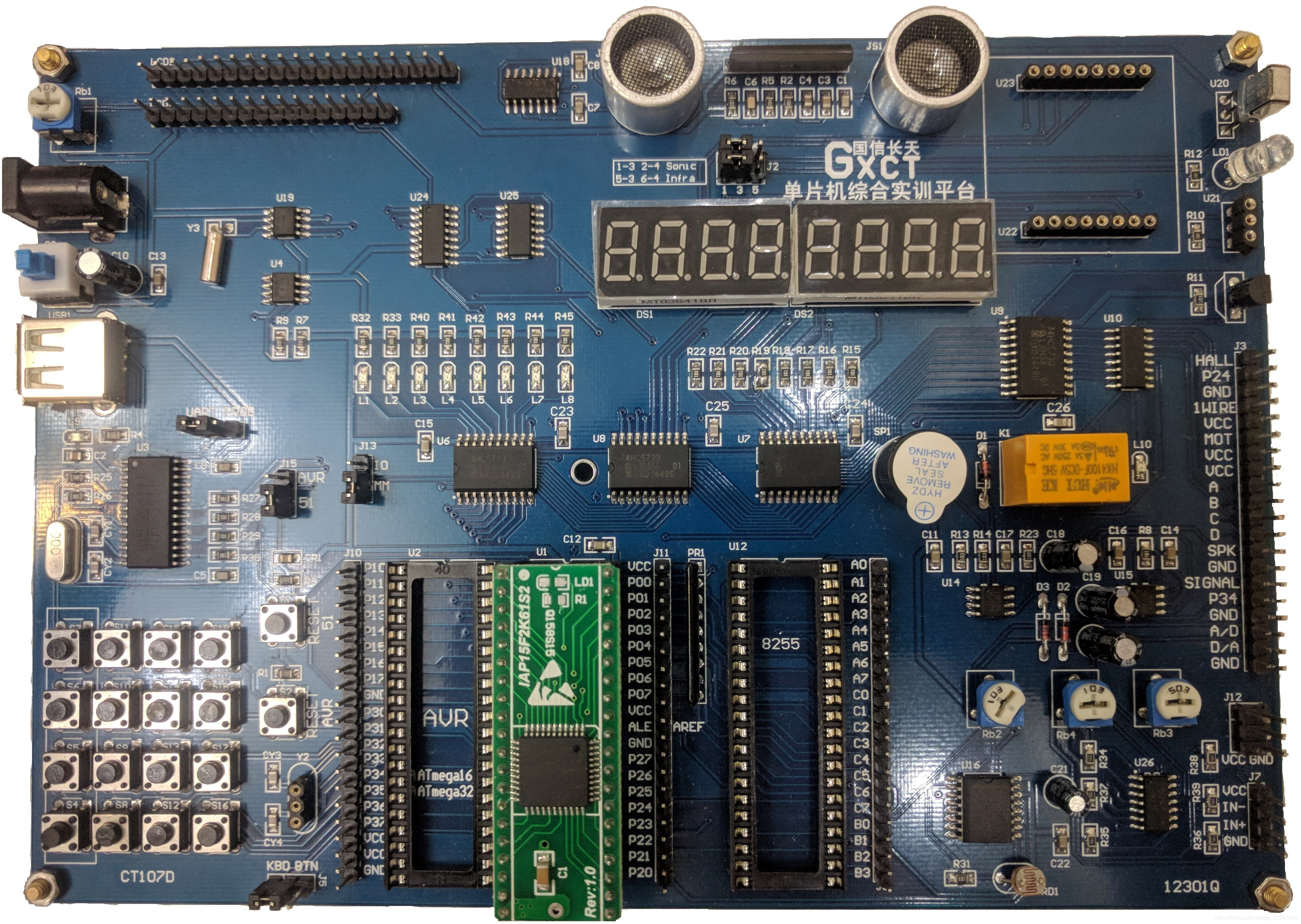
# 实物图
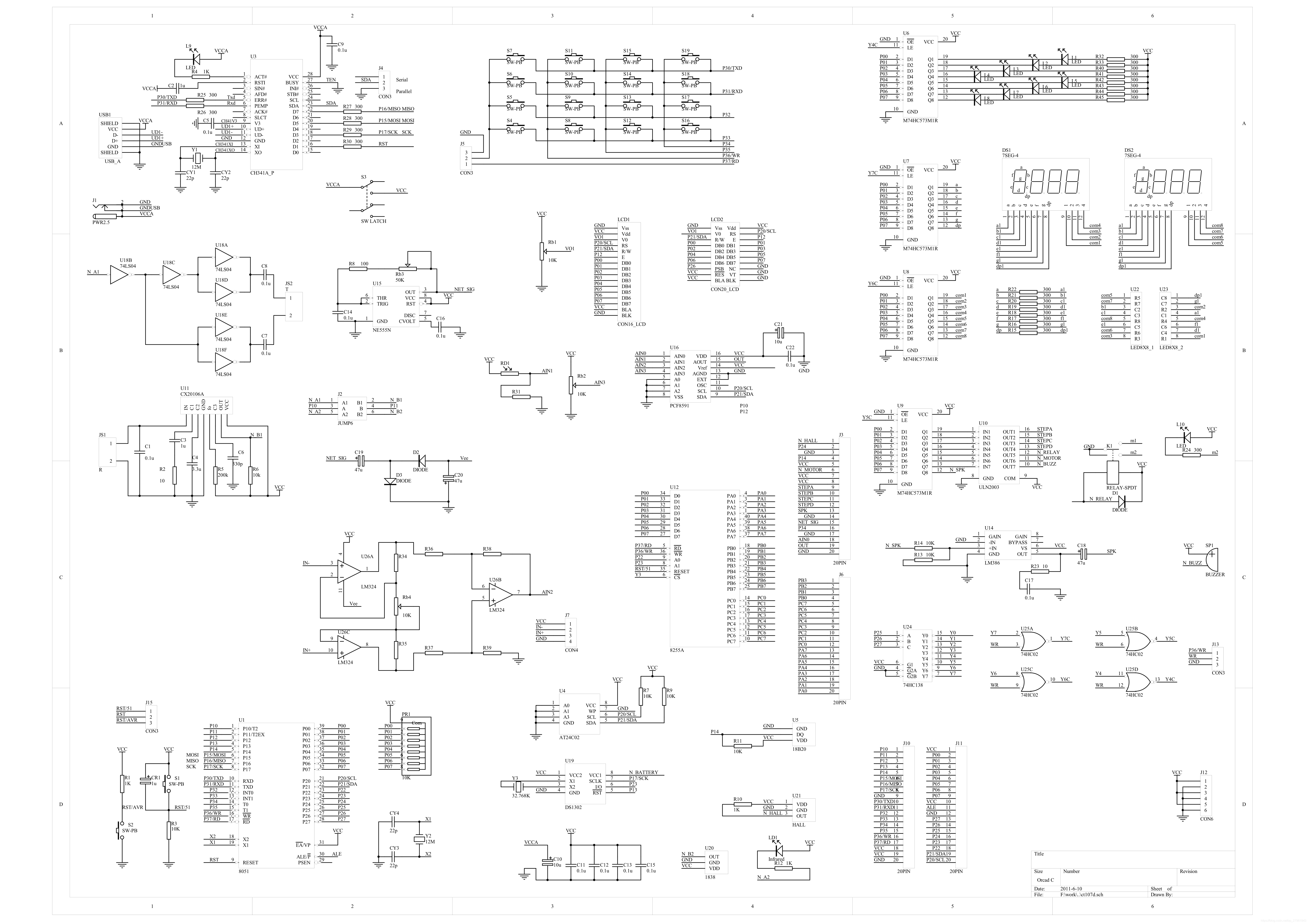
# 电路原理图
# 独立下载程序(可直接下载运行)_CT107D 赛前准备 (opens new window)
# 独立下载程序(可直接下载运行)CT107D 赛前准备含 USB 转串口驱动 (opens new window)
# 更新时间:2019-3-22
- 所有文件(源代码) (opens new window)
common.hmain.ctimer.chc138.cled.cdrivers.cdigital_tube.ckey.cds18b20.cds1302.ci2c.csonic_infra.c
# 功能介绍
K1:打印从串口接收到的信息,并显示在数码管上
K2:显示DS18B20温度值
K3:读取DS1302的时分秒值
K4:读取DS1302的星期的值
K5:读取DS1302的年月日的值
K6:从EEPROM中写入并读出数据(隔一秒加1)
K7:显示超声波的距离
K8:显示A/D管脚的输入AD值(AD0)
K9:显示光敏电阻的AD值(AD1)
K10:显示IN-/IN+的差分AD值(AD2)
K11:显示电位器的AD值(AD3)(Rb2)
K12:显示D/A管脚的输出DA值(127,2.5V)
K13:让接在MOT与VCC之间的电机以30%(1.5V)的速度旋转
连按两下任意按键,显示按键对应的值:
1,2,3,4,
5,6,7,8,
9,a,b,c,
d,e,f,.
长按任意按键,LED(L1-L8)显示对应的值二进制值(从左往右,L1->L2->L3->L4->L5->L6->L7->L8)
按键按下时有蜂鸣器提示音
波特率为2400
x^1=~x; X^0=X;
Px^x不可直接赋值,Pxx可直接赋值;
P4^2,不可直接赋值,P42=0,可直接赋值;
Can't shift a single PIN, but can shift the entire I/O port;
(不可移位单个PIN,可移位整个I/O口);
Declare variable first, then operate; //uchar i; TR0=0;
(先声明变量,后操作);
(数码管先段码再位码);
(数据总线在读写之前要释放);
(协议传输中拉低拉高需要一定的时间,因查看相应的说明书);// PCF8591的速度比I2C慢,SCL需要延迟5us
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
# 所有文件(all files)
# common.h
common.h
#ifndef COMMON_H
#define COMMON_H
#include "stc15f2k60s2.h"
#include "intrins.h"
typedef unsigned char uchar;
typedef unsigned short int uint;
#define seg_tab_none 19
#define bit_tab_none 8
extern uchar disp_val[8];
extern uchar trg,cont,key_val;
extern void Timer0Init(void);
extern void Timer1Init(void);
extern void UartInit(void);
extern void hc138Init(void);
extern void hc138_led(void);
extern void hc138_drivers(void);
extern void hc138_bit(void);
extern void hc138_seg(void);
extern void hc138_none(void);
extern void ledInit(void);
extern void led_on_N(uchar led);
extern void relayInit(void);
extern void relay_off(void);
extern void motorInit(void);
extern void motor_on(void);
extern void motor_off(void);
extern void buzzInit(void);
extern void buzz_on(void);
extern void buzz_off(void);
extern void disp_scan(void);
extern void disp_val_none(void);
extern void key_scan(void);
extern void ds18b20Init(void);
extern uchar ds18b20_get(void);
extern void ds1302_burst_write(uchar *dat);
extern void ds1302_burst_read(uchar *dat);
extern void ds1302Init(void);
extern uint sonic_get(void);
//extern void e2_reset(void);
extern void e2_write(uchar word,uchar *dat,uchar len);
extern void e2_read(uchar word,uchar *dat,uchar len);
extern void adc_get(uchar *dat,uchar len);
extern void dac_set(uchar dat);
#endif
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
# main.c
main.c
#include "common.h"
void SysInit(void)
{
disp_val_none();
Timer0Init();
Timer1Init();
UartInit();
//Timer2Init();
hc138Init();
ledInit();
buzzInit();
motorInit();
relayInit();
ds18b20Init();
ds1302Init();
//e2_reset();
EA=1;
ET0=1;
ET1=1;
ES=1;
//IE2|=0x04;
}
void main(void)
{
SysInit();
while(1);
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
# timer.c
timer.c
#include "common.h"
static uchar page=1;
static uchar rxd_data=0;
static uchar temperature=0;
static uchar ds1302_time[7];
static uint sonic_distance=0;
static idata uchar e2_write_data[8]={0,1,2,3,4,5,6,7},e2_read_data[8];
static uchar adc_data[4];
static uchar dac_data=128;
static uchar trg_times,trg_clock,cont_clock;
static uchar pwm_clock,pwm_data=30;
static bit pwm_flag=0;
static uchar buzz=0;
void Timer0Init(void) //10微秒@11.0592MHz
{
AUXR &= 0x7F; //定时器时钟12T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0xF7; //设置定时初值
TH0 = 0xFF; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
void Timer1Init(void) //50毫秒@11.0592MHz
{
AUXR &= 0xBF; //定时器时钟12T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x00; //设置定时初值
TH1 = 0x4C; //设置定时初值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
}
void UartInit(void) //2400bps@11.0592MHz
{
SCON = 0x50; //8位数据,可变波特率
AUXR |= 0x01; //串口1选择定时器2为波特率发生器
AUXR &= 0xFB; //定时器2时钟为Fosc/12,即12T
T2L = 0xA0; //设定定时初值
T2H = 0xFF; //设定定时初值
AUXR |= 0x10; //启动定时器2
}
void trg_run(void)
{
if(trg)
{
if(++trg_times==1)
{
trg_clock=0;
}
buzz=1;
switch(key_val)
{
case 1:page=1;break;
case 2:page=2;break;
case 3:page=3;break;
case 4:page=4;break;
case 5:page=5;break;
case 6:page=6;break;
case 7:page=7;break;
case 8:page=8;break;
case 9:page=9;break;
case 10:page=10;break;
case 11:page=11;break;
case 12:page=12;break;
case 13:page=13;break;
case 14:page=14;break;
case 15:page=15;break;
case 16:page=16;break;
default:break;
}
}
}
void trg_double_run(void)
{
if(++trg_clock>=15)
{
trg_clock=0;
trg_times=0;
}
if(trg_clock<15&&trg_times==2)
{
trg_clock=0;
trg_times=0;
disp_val_none();
switch(key_val)
{
case 1:disp_val[0]=key_val;break;
case 2:disp_val[0]=key_val;break;
case 3:disp_val[0]=key_val;break;
case 4:disp_val[0]=key_val;break;
case 5:disp_val[0]=key_val;break;
case 6:disp_val[0]=key_val;break;
case 7:disp_val[0]=key_val;break;
case 8:disp_val[0]=key_val;break;
case 9:disp_val[0]=key_val;break;
case 10:disp_val[0]=key_val;break;
case 11:disp_val[0]=key_val;break;
case 12:disp_val[0]=key_val;break;
case 13:disp_val[0]=key_val;break;
case 14:disp_val[0]=key_val;break;
case 15:disp_val[0]=key_val;break;
case 16:disp_val[0]=key_val;break;
default:break;
}
}
}
void cont_run(void)
{
if(cont)
{
if(++cont_clock>=20)
{
switch(key_val)
{
case 1:led_on_N(~key_val);break;
case 2:led_on_N(~key_val);break;
case 3:led_on_N(~key_val);break;
case 4:led_on_N(~key_val);break;
case 5:led_on_N(~key_val);break;
case 6:led_on_N(~key_val);break;
case 7:led_on_N(~key_val);break;
case 8:led_on_N(~key_val);break;
case 9:led_on_N(~key_val);break;
case 10:led_on_N(~key_val);break;
case 11:led_on_N(~key_val);break;
case 12:led_on_N(~key_val);break;
case 13:led_on_N(~key_val);break;
case 14:led_on_N(~key_val);break;
case 15:led_on_N(~key_val);break;
case 16:led_on_N(~key_val);break;
default:break;
}
}
}
else
{
cont_clock=0;
led_on_N(0xff);
}
}
void buzz_run(void)
{
if(buzz==1)
{
buzz=2;
relay_off();
buzz_on();
}
else if(buzz==2)
{
buzz=0;
relay_off();
buzz_off();
}
}
void uart_run(void)
{
disp_val_none();
disp_val[0]=rxd_data%10;
disp_val[1]=rxd_data%100/10;
disp_val[2]=rxd_data/100;
}
void ds18b20_run(void)
{
disp_val_none();
temperature=ds18b20_get();
disp_val[0]=0x0c;
disp_val[1]=18;
disp_val[2]=temperature%10;
disp_val[3]=temperature/10;
}
void ds1302_HHMMSS_run(void)
{
disp_val_none();
ds1302_burst_read(ds1302_time);
disp_val[0]=ds1302_time[0]&0x0f;
disp_val[1]=ds1302_time[0]>>4&0x0f;
disp_val[2]=17;
disp_val[3]=ds1302_time[1]&0x0f;
disp_val[4]=ds1302_time[1]>>4&0x0f;
disp_val[5]=17;
disp_val[6]=ds1302_time[2]&0x0f;
disp_val[7]=ds1302_time[2]>>4&0x0f;
}
void ds1302_week_run(void)
{
disp_val_none();
ds1302_burst_read(ds1302_time);
disp_val[0]=17;
disp_val[1]=17;
disp_val[2]=17;
disp_val[3]=17;
disp_val[4]=ds1302_time[5]&0x0f;
disp_val[5]=17;
disp_val[6]=17;
disp_val[7]=17;
}
void ds1302_YYMMDD_run(void)
{
disp_val_none();
ds1302_burst_read(ds1302_time);
disp_val[0]=ds1302_time[3]&0x0f;
disp_val[1]=ds1302_time[3]>>4&0x0f;
disp_val[2]=17;
disp_val[3]=ds1302_time[4]&0x0f;
disp_val[4]=ds1302_time[4]>>4&0x0f;
disp_val[5]=17;
disp_val[6]=ds1302_time[6]&0x0f;
disp_val[7]=ds1302_time[6]>>4&0x0f;
}
void sonic_run(void)
{
disp_val_none();
sonic_distance=sonic_get();
disp_val[0]=sonic_distance%10;
disp_val[1]=sonic_distance%100/10;
disp_val[2]=sonic_distance%1000/100;
disp_val[3]=sonic_distance%10000/1000;
disp_val[4]=sonic_distance/10000;
}
void e2_run(void)
{
static uchar i=0;
disp_val_none();
e2_write(0x00,e2_write_data,sizeof(e2_write_data));
e2_read(0x00,e2_read_data,sizeof(e2_read_data));
disp_val[0]=e2_read_data[0]%10;
disp_val[1]=e2_read_data[0]%100/10;
disp_val[2]=e2_read_data[0]/100;
disp_val[3]=e2_read_data[1]%10;
disp_val[4]=e2_read_data[1]%100/10;
disp_val[5]=e2_read_data[1]/100;
disp_val[6]=e2_read_data[2]%10;
disp_val[7]=e2_read_data[2]%100/10;
for(i=0;i<sizeof(e2_write_data);i++)
{
e2_write_data[i]++;
}
}
void adc_run(void)
{
disp_val_none();
adc_get(adc_data,sizeof(adc_data));
disp_val[0]=adc_data[page-8]%10;
disp_val[1]=adc_data[page-8]%100/10;
disp_val[2]=adc_data[page-8]/100;
disp_val[3]=0x11;
disp_val[4]=page-8;
disp_val[5]=0x0d;
disp_val[6]=0x0a;
disp_val[7]=0x11;
}
void dac_run(void)
{
disp_val_none();
dac_set(dac_data);
adc_get(adc_data,sizeof(adc_data));
disp_val[0]=adc_data[0]%10;
disp_val[1]=adc_data[0]%100/10;
disp_val[2]=adc_data[0]/100;
disp_val[3]=0x11;
disp_val[4]=0x0c;
disp_val[5]=0x0a;
disp_val[6]=0x0d;
disp_val[7]=0x11;
}
void pwm_run(void)
{
static uint clock=0;
if(pwm_flag)
{
if(++pwm_clock<=pwm_data)
{
relay_off();
buzz_off();
motor_on();
}
else if(pwm_clock>pwm_data&&pwm_clock<=100)
{
relay_off();
buzz_off();
motor_off();
}
else
{
pwm_clock=0;
if(++clock==1000)
{
clock=0;
disp_val_none();
disp_val[0]=0x11;
disp_val[1]=0x11;
disp_val[2]=0x11;
disp_val[3]=pwm_data%10;
disp_val[4]=pwm_data%100/10;
disp_val[5]=pwm_data/100;
disp_val[6]=0x11;
disp_val[7]=0x11;
}
}
}
}
void Timer0_Routine(void) interrupt 1
{
// 10us
static uchar clock=0;
TR0=0;
if(++clock==100)
{
clock=0;
disp_scan();
}
pwm_run();
TR0=1;
}
void Timer1_Routine(void) interrupt 3
{
// 50ms
static uint clock=0;
TR1=0;
key_scan();
trg_run();
trg_double_run();
cont_run();
relay_off();
buzz_off();
motor_off();
buzz_run();
if(++clock==20)
{
clock=0;
switch(page)
{
case 1:pwm_flag=0;uart_run();break;
case 2:pwm_flag=0;ds18b20_run();break;
case 3:pwm_flag=0;ds1302_HHMMSS_run();break;
case 4:pwm_flag=0;ds1302_week_run();break;
case 5:pwm_flag=0;ds1302_YYMMDD_run();break;
case 6:pwm_flag=0;sonic_run();break;
case 7:pwm_flag=0;e2_run();break;
case 8:pwm_flag=0;adc_run();break;
case 9:pwm_flag=0;adc_run();break;
case 10:pwm_flag=0;adc_run();break;
case 11:pwm_flag=0;adc_run();break;
case 12:pwm_flag=0;dac_run();break;
case 13:pwm_flag=1;break;
default:break;
}
}
TR1=1;
}
void Uart(void) interrupt 4
{
REN=0;
if(RI)
{
RI=0;
rxd_data=SBUF;
SBUF=rxd_data;
}
if(TI)
{
TI=0;
}
REN=1;
}
//void Timer2_Routine(void) interrupt 12
//{
// //50ms
// AUXR&=0xef;
//
// AUXR|=0x10;
//}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
# hc138.c
hc138.c
#include "common.h"
#define HC138 P2
void hc138Init(void)
{
HC138&=0x1f;
}
void hc138_none(void)
{
HC138&=0x1f;
}
void hc138_led(void)
{
HC138&=0x1f;
HC138|=0x80;
}
void hc138_drivers(void)
{
HC138&=0x1f;
HC138|=0xa0;
}
void hc138_bit(void)
{
HC138&=0x1f;
HC138|=0xc0;
}
void hc138_seg(void)
{
HC138&=0x1f;
HC138|=0xe0;
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
# led.c
led.c
#include "common.h"
#define LED P0
void ledInit(void)
{
LED=0xff;
hc138_led();
hc138_none();
}
void led_on_N(uchar led)
{
LED=led;
hc138_led();
hc138_none();
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
# drivers.c
drivers.c
#include "common.h"
sbit RELAY_PIN=P0^4;
sbit MOTOR_PIN=P0^5;
sbit BUZZ_PIN=P0^6;
void relayInit(void)
{
RELAY_PIN=0;
hc138_drivers();
hc138_none();
}
void relay_off(void)
{
RELAY_PIN=0;
hc138_drivers();
hc138_none();
}
void motorInit(void)
{
MOTOR_PIN=0;
hc138_drivers();
hc138_none();
}
void motor_on(void)
{
MOTOR_PIN=1;
hc138_drivers();
hc138_none();
}
void motor_off(void)
{
MOTOR_PIN=0;
hc138_drivers();
hc138_none();
}
void buzzInit(void)
{
BUZZ_PIN=0;
hc138_drivers();
hc138_none();
}
void buzz_on(void)
{
BUZZ_PIN=1;
hc138_drivers();
hc138_none();
}
void buzz_off(void)
{
BUZZ_PIN=0;
hc138_drivers();
hc138_none();
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
# digital_tube.c
digital_tube.c
#include "common.h"
#define SEG P0
#define BIT P0
uchar seg_tab[20]={0xc0,0xf9,0xa4,0xb0,0x99,
0x92,0x82,0xf8,0x80,0x90,
0x88,0x83,0xc6,0xa1,0x86,0x8e,
0x7f,0xbf,0x9c,0xff};//0~9,a~f,.,-,o,none
uchar bit_tab[9]={0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01,0x00};
uchar disp_val[8]={seg_tab_none,seg_tab_none,seg_tab_none,seg_tab_none,
seg_tab_none,seg_tab_none,seg_tab_none,seg_tab_none,};
void disp_scan(void)
{
static uchar pointer=0;
SEG=seg_tab[seg_tab_none];
hc138_seg();
SEG=seg_tab[disp_val[pointer]];
hc138_none();
BIT=bit_tab[bit_tab_none];
hc138_bit();
BIT=bit_tab[pointer];
hc138_none();
if(++pointer==sizeof(disp_val))
{
pointer=0;
}
}
void disp_val_none(void)
{
uchar i;
for(i=0;i<sizeof(disp_val);i++)
{
disp_val[i]=seg_tab_none;
}
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
# key.c
key.c
#include "common.h"
#define KEY P3
uchar trg,cont,trg_row,trg_column,cont_row,cont_column,key_val;
void key_scan(void)
{
uchar readdata=0x00,P42_val,P44_val;
KEY=0x0f;
P42=0;
P44=0;
P42_val=P42;
P44_val=P44;
P42_val=P42_val<<6&0x40;
P44_val=P44_val<<7&0x80;
readdata=KEY&0x3f|P42_val|P44_val;
readdata^=0x0f;
trg_row=readdata&(readdata^cont_row);
cont_row=readdata;
KEY=0xf0;
P42=1;
P44=1;
P42_val=P42;
P44_val=P44;
P42_val=P42_val<<6&0x40;
P44_val=P44_val<<7&0x80;
readdata=KEY&0x3f|P42_val|P44_val;
readdata^=0xf0;
trg_column=readdata&(readdata^cont_column);
cont_column=readdata;
trg=trg_row|trg_column;
cont=cont_row|cont_column;
switch(trg)
{
case 0x81:key_val=1;break;
case 0x41:key_val=2;break;
case 0x21:key_val=3;break;
case 0x11:key_val=4;break;
case 0x82:key_val=5;break;
case 0x42:key_val=6;break;
case 0x22:key_val=7;break;
case 0x12:key_val=8;break;
case 0x84:key_val=9;break;
case 0x44:key_val=10;break;
case 0x24:key_val=11;break;
case 0x14:key_val=12;break;
case 0x88:key_val=13;break;
case 0x48:key_val=14;break;
case 0x28:key_val=15;break;
case 0x18:key_val=16;break;
default:break;
}
KEY=0xff;
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
# ds18b20.c
ds18b20.c
#include "common.h"
sbit DQ=P1^4;
void Delay500us() //@11.0592MHz
{
unsigned char i, j;
_nop_();
_nop_();
i = 6;
j = 93;
do
{
while (--j);
} while (--i);
}
void Delay50us() //@11.0592MHz
{
unsigned char i, j;
_nop_();
i = 1;
j = 134;
do
{
while (--j);
} while (--i);
}
void ds18b20_start(void)
{
DQ=1;
DQ=0;
Delay500us();
DQ=1;
Delay50us();
while(~DQ);
}
void ds18b20_write(uchar dat)
{
static uchar mask=0x00;
DQ=1;
for(mask=0x01;mask;mask<<=1)
{
DQ=0;
DQ=dat&mask;
Delay50us();
Delay50us();
DQ=1;
}
DQ=1;
}
uchar ds18b20_read(void)
{
static uchar mask=0x00,val=0;
DQ=1;
for(mask=0x01;mask;mask<<=1)
{
DQ=0;
DQ=1;
if(DQ)
val|=mask;
else
val&=~mask;
Delay50us();
Delay50us();
}
DQ=1;
return val;
}
void ds18b20Init(void)
{
ds18b20_start();
ds18b20_write(0xcc);
ds18b20_write(0x44);
}
uchar ds18b20_get(void)
{
static uchar val=0,temp[2];
ds18b20_start();
ds18b20_write(0xcc);
ds18b20_write(0x44);
ds18b20_start();
ds18b20_write(0xcc);
ds18b20_write(0xbe);
temp[0]=ds18b20_read();
temp[1]=ds18b20_read();
val=temp[0]>>4&0x0f|temp[1]<<4&0xf0;
return val;
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
# ds1302.c (burst_mode)
ds1302.c
#include "common.h"
sbit CE=P1^3;
sbit SCLK=P1^7;
sbit I_O=P2^3;
uchar ds1302_init_time[7]={0x50,0x08,0x21,0x22,0x03,0x05,0x19};
void ds1302_write_byte(uchar dat)
{
static uchar mask=0x00;
I_O=1;
for(mask=0x01;mask;mask<<=1)
{
I_O=dat&mask;
SCLK=1;
SCLK=0;
}
I_O=1;
}
uchar ds1302_read_byte(void)
{
static uchar mask=0x00,val=0;
I_O=1;
for(mask=0x01;mask;mask<<=1)
{
SCLK=1;
if(I_O)
val|=mask;
else
val&=~mask;
SCLK=0;
}
I_O=1;
return val;
}
void ds1302_address(uchar reg,bit read)
{
reg<<=1;
if(read)
reg|=0x01;
else
reg&=0xfe;
ds1302_write_byte(reg);
}
void ds1302_single_write(uchar reg,uchar dat)
{
SCLK=0;
I_O=0;
CE=1;
ds1302_address(reg,0);
ds1302_write_byte(dat);
CE=0;
}
uchar ds1302_single_read(uchar reg)
{
static uchar val=0;
SCLK=0;
I_O=0;
CE=1;
ds1302_address(reg,1);
val=ds1302_read_byte();
CE=0;
return val;
}
void ds1302_burst_write(uchar *dat)
{
static uchar i=0;
SCLK=0;
I_O=0;
CE=1;
ds1302_write_byte(0xbe);
for(i=0;i<8;i++)
ds1302_write_byte(*dat++);
CE=0;
}
void ds1302_burst_read(uchar *dat)
{
static uchar i=0;
SCLK=0;
I_O=0;
CE=1;
ds1302_write_byte(0xbf);
for(i=0;i<8;i++)
*dat++=ds1302_read_byte();
CE=0;
}
void ds1302Init(void)
{
ds1302_single_write(7,0);
if(ds1302_single_read(0)&0x80)
ds1302_burst_write(ds1302_init_time);
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
# i2c.c (Page_Write, Random_Sequential_Read)
i2c.c
//数据总线要释放
#include "common.h"
sbit SCL=P2^0;
sbit SDA=P2^1;
void Delay5us() //@11.0592MHz
{
unsigned char i;
_nop_();
i = 11;
while (--i);
}
void i2c_start(void)
{
SDA=1;
Delay5us();
SCL=1;
Delay5us();
SDA=0;
Delay5us();
SCL=0;
Delay5us();
}
void i2c_stop(void)
{
SCL=0;
Delay5us();
SDA=0;
Delay5us();
SCL=1;
Delay5us();
SDA=1;
Delay5us();
}
bit i2c_write_byte(uchar dat)
{
bit ack=1;
static uchar mask=0x00;
SDA=1;
Delay5us();
for(mask=0x80;mask;mask>>=1)
{
SDA=dat&mask;
Delay5us();
SCL=1;
Delay5us();
SCL=0;
Delay5us();
}
SDA=1;
Delay5us();
SCL=1;
Delay5us();
ack=SDA;
SCL=0;
Delay5us();
return ack;
}
uchar i2c_read_byte_ack(void)
{
static uchar mask=0x00,val=0;
SDA=1;
Delay5us();
for(mask=0x80;mask;mask>>=1)
{
SCL=1;
Delay5us();
if(SDA)
val|=mask;
else
val&=~mask;
Delay5us();
SCL=0;
Delay5us();
}
SDA=1;
Delay5us();
SDA=0;
Delay5us();
SCL=1;
Delay5us();
SCL=0;
Delay5us();
return val;
}
uchar i2c_read_byte_nack(void)
{
static uchar mask=0x00,val=0;
SDA=1;
Delay5us();
for(mask=0x80;mask;mask>>=1)
{
SCL=1;
Delay5us();
if(SDA)
val|=mask;
else
val&=~mask;
Delay5us();
SCL=0;
Delay5us();
}
SDA=1;
Delay5us();
SCL=1;
Delay5us();
SCL=0;
Delay5us();
return val;
}
bit i2c_device(uchar dev,bit read)
{
bit ack=1;
dev<<=1;
if(read)
dev|=0x01;
else
dev&=0xfe;
ack=i2c_write_byte(dev);
return ack;
}
void adc_get(uchar *dat,uchar len)
{
do{
i2c_start();
if(~i2c_device(0x48,0))
break;
i2c_stop();
}while(1);
i2c_write_byte(0x44);
i2c_start();
i2c_device(0x48,1);
i2c_read_byte_ack();
while(len-->1)
*dat++=i2c_read_byte_ack();
*dat=i2c_read_byte_nack();
i2c_stop();
}
void dac_set(uchar dat)
{
do{
i2c_start();
if(~i2c_device(0x48,0))
break;
i2c_stop();
}while(1);
i2c_write_byte(0x44);
i2c_write_byte(dat);
i2c_stop();
}
void e2_write(uchar word,uchar *dat,uchar len)
{
do{
i2c_start();
if(~i2c_device(0x50,0))
break;
i2c_stop();
}while(1);
i2c_write_byte(word);
while(len--)
i2c_write_byte(*dat++);
i2c_stop();
}
void e2_read(uchar word,uchar *dat,uchar len)
{
do{
i2c_start();
if(~i2c_device(0x50,0))
break;
i2c_stop();
}while(1);
i2c_write_byte(word);
i2c_start();
i2c_device(0x50,1);
while(len-->1)
*dat++=i2c_read_byte_ack();
*dat=i2c_read_byte_nack();
i2c_stop();
}
//void e2_reset(void)
//{
// static uchar i=0;
// for(i=0;i<255;i++)
// {
// e2_write(i,0);
// }
//}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
# sonic_infra.c
sonic_infra.c
#include "common.h"
sbit TX=P1^0;
sbit RX=P1^1;
uchar sonic_times=8;
void Delay10us() //@11.0592MHz
{
unsigned char i;
_nop_();
i = 25;
while (--i);
}
void sonic_emit(uchar times)
{
// 50KHz
while(times--)
{
TX=1;
Delay10us();
TX=0;
Delay10us();
}
}
uint sonic_echo(void)
{
static uchar tl,th;
static uint distance,time;
tl=TL1;
th=TH1;
TH1=0x00;
TL1=0x00;
TF1=0;
TR1=1;
while(RX&&~TF1);
TR1=0;
if(TF1)
{
TF1=0;
distance=9999;
return distance;
}
else
{
time=TH1;
time<<=8;
time|=TL1;
}
TH1=th;
TL1=tl;
distance=(uint)(time*0.017); // x=t*v=time/1000000*340*100/2
return distance;
}
uint sonic_get(void)
{
static uint distance=0;
sonic_emit(sonic_times);
distance=sonic_echo();
return distance;
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
- [x] common.h
- [x] main.c
- [x] timer.c
- [x] hc138.c ---> 数据手册 (opens new window)
- [x] led.c
- [x] drivers.c
- [x] digital_tube.c
- [x] key.c
- [x] ds18b20 ---> 数据手册 (opens new window)
- [x] ds1302 ---> 数据手册 (opens new window)
- [x] IIC ---> 数据手册(AT24C02) (opens new window),数据手册(PCF8591) (opens new window)
- [ ] sonic_infra
- [x] pwm
- [ ] 客观题